时间:2025-11-03 11:22
人气:
作者:admin
在计算机视觉领域,如何构建一个能够像人类一样从第一人称视角感知环境、预测未来并执行动作的智能体(Agent),仍是一个基础性难题。现有方法通常将感知、预测与行动任务分别建模,忽略了它们之间的内在联系,限制了智能体在真实世界中的综合理解与交互能力。
受人类通过感知-行动循环学习的启发,本文提出了一种统一的第一人称智能体模型——EgoAgent,旨在同时学习环境表示、未来状态预测与三维动作生成。
本文提出了一种联合嵌入-动作-预测(Joint Embedding-Action-Prediction, JEAP)架构,通过交错建模状态与动作序列,并结合时间不对称的预测器-观察器分支,实现了三个任务的协同优化。
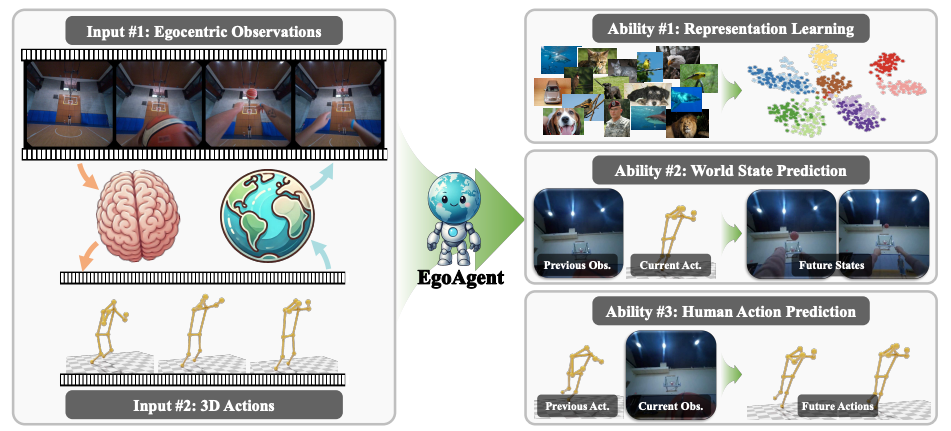
实验表明,EgoAgent 在图像分类、未来状态预测与三维人体运动预测等任务中均显著优于现有方法,例如在 ImageNet-1K 分类任务中提升 1.32%,在未来状态预测任务中提升超过 16%,验证了其统一建模的有效性。
当前,视觉表示学习、世界模型与动作预测等领域的研究多独立进行。视觉表示学习方法(如 DINO、R3M)通过自监督学习从图像或视频中提取高层语义特征;世界模型(如 GAIA-1、JEPA)则关注环境状态在动作影响下的动态演变;动作预测方法(如 siMLPe、HumanMAC)则基于历史动作序列预测未来人体运动。
然而,认知科学中的“共同编码理论”指出,感知与行动在人类认知中密不可分,共享同一表示空间。现有方法未能有效建模三者之间的因果与时序依赖,限制了智能体在真实环境中的综合能力。
本文在已有研究基础上,首次提出将表示学习、状态预测与动作生成统一于一个模型中,通过引入交错序列建模与时间不对称的预测-观察机制,实现了三者之间的联合学习与相互增强。
EgoAgent 的核心思路是将第一人称观察与三维动作编码为交错序列,通过因果注意力机制联合预测未来状态与动作。
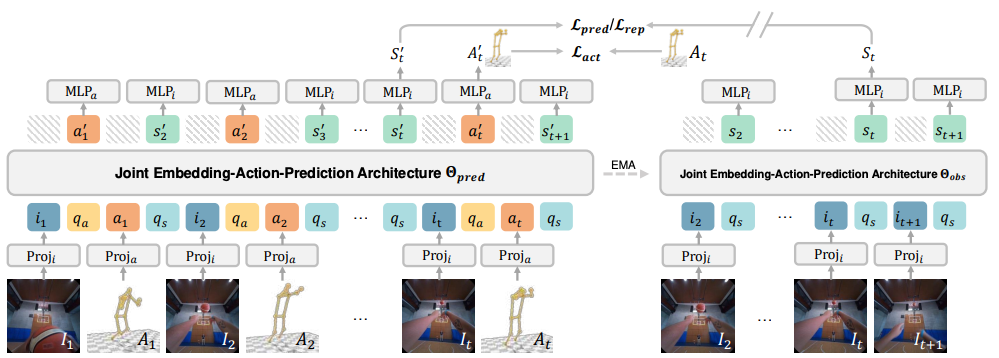
模型将输入的第一人称视频帧 与三维人体动作 分别编码为图像令牌 与动作令牌 ,并插入可学习的动作查询令牌 与状态查询令牌 ,构成如下交错序列:
通过因果注意力机制, 聚合所有之前的图像与动作令牌以预测当前动作 , 则进一步结合当前动作以预测下一状态 。预测器与观察器分支采用时间不对称结构,观察器仅处理图像输入,提供目标状态 作为预测器的监督信号。状态预测损失采用 DINO 损失函数:
动作预测损失采用 L1 损失:
此外,引入自监督表示损失 以增强表示学习能力。总损失为三者加权和:
模型在 WalkingTours(WT)与 Ego-Exo4D 两个第一人称数据集上训练,分别包含约 150 万帧图像与 221.26 小时视频及 3D 动作标注。评估任务包括世界状态预测(Top1 准确率与 mAP)、三维人体运动预测(MPJPE 与 MPJVE)与视觉表示(ImageNet 分类准确率)。
EgoAgent 在 Ego-Exo4D 数据集上的世界状态预测任务中,Top1 准确率达到 46.43%,mAP 达到 61.96%,显著优于 DoRA(+16.28% Top1)等基线方法。实验表明,模型能够有效预测由动作引起的未来状态变化,而非仅依赖当前语义相似性。
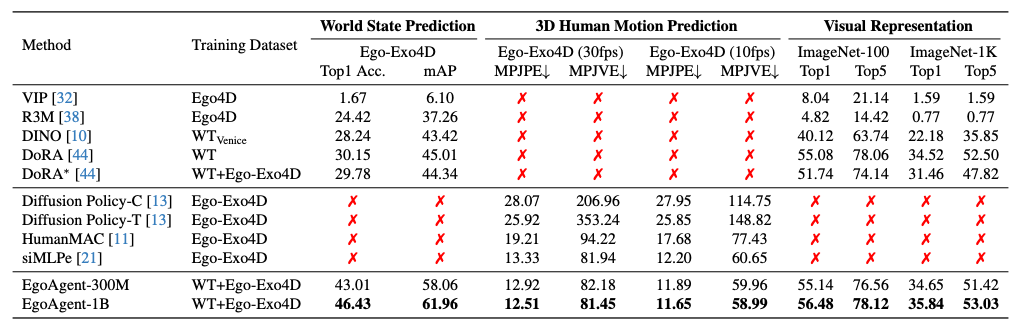
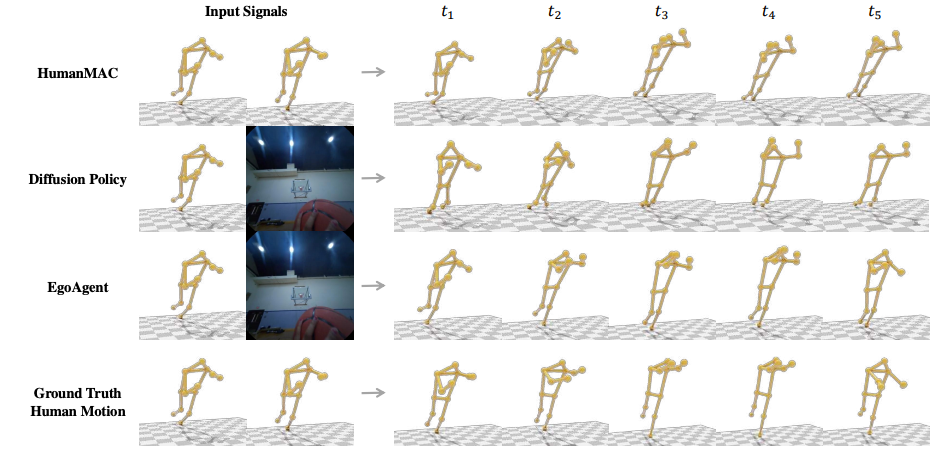
在 30 fps 预测任务中,EgoAgent-1B 的 MPJPE 为 12.51 cm,优于 siMLPe(13.33 cm)与 HumanMAC(19.21 cm)。模型在遮挡情况下仍能准确预测不可见关节位置,显示出对动作上下文的理解能力。
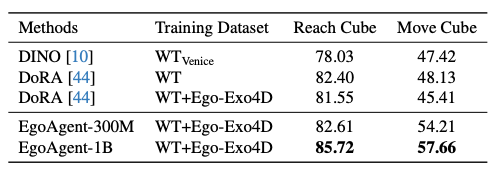
在 ImageNet-1K 图像分类任务中,EgoAgent-1B 达到 35.84% Top1 准确率,优于 DoRA(34.52%)。在 TriFinger 机器人操作任务中,EgoAgent 在“移动方块”任务中成功率提升 3.9%,表明其表示能力可迁移至具身控制任务。
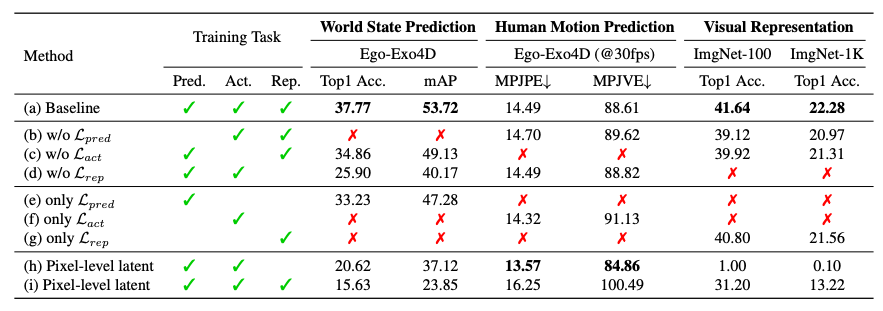
消融实验表明,移除任一任务(表示、预测或动作)均会导致其他任务性能下降。例如,移除表示损失 会使状态预测 Top1 准确率下降 11.87%。此外,使用 VQGAN 的像素级潜在空间训练模型会严重损害表示与预测能力,验证了高层次语义特征空间的有效性。
EgoAgent 通过统一建模第一人称视角下的表示学习、状态预测与动作生成,显著提升了智能体在复杂环境中的综合理解与交互能力。其在多个任务上的优越表现验证了联合学习的有效性,尤其是在状态预测与动作生成任务中展现出对因果关系的建模能力。
该方法对机器人、增强现实与虚拟人等实际应用具有重要价值。然而,模型尚未引入长时记忆机制,对长期依赖任务的支持有限;此外,手部精细动作的建模仍有提升空间。未来可考虑引入时序记忆模块与多尺度动作表示,进一步提升模型在长序列与精细化操作任务中的表现。
我国在AI大模型领域面临人才短缺,数量与质量均落后于发达国家。2023年,人才缺口已超百万,凸显培养不足。随着Al技术飞速发展,预计到2025年,这一缺口将急剧扩大至400万,严重制约我国Al产业的创新步伐。加强人才培养,优化教育体系,国际合作并进,是破解困局、推动AI发展的关键。
但是具体到个人,只能说是:
“最先掌握AI的人,将会比较晚掌握AI的人有竞争优势”。
这句话,放在计算机、互联网、移动互联网的开局时期,都是一样的道理。
我在一线互联网企业工作十余年里,指导过不少同行后辈。帮助很多人得到了学习和成长。
我意识到有很多经验和知识值得分享给大家,也可以通过我们的能力和经验解答大家在人工智能学习中的很多困惑,所以在工作繁忙的情况下还是坚持各种整理和分享。但苦于知识传播途径有限,很多互联网行业朋友无法获得正确的资料得到学习提升,故此将重要的AI大模型资料包括AI大模型入门学习思维导图、精品AI大模型学习书籍手册、视频教程、实战学习等录播视频免费分享出来。

明确的学习路线至关重要。它能指引新人起点、规划学习顺序、明确核心知识点。大模型领域涉及的知识点非常广泛,没有明确的学习路线可能会导致新人感到迷茫,不知道应该专注于哪些内容。
对于从来没有接触过AI大模型的同学,我帮大家准备了从零基础到精通学习成长路线图以及学习规划。可以说是最科学最系统的学习路线。

针对以上大模型的学习路线我们也整理了对应的学习视频教程,和配套的学习资料。
新手必备的大模型学习PDF书单来了!全是硬核知识,帮你少走弯路!
所有视频教程所涉及的实战项目和项目源码等
MoPaaS专注于Al技术能力建设与应用场景开发,与智学优课联合孵化,培养适合未来发展需求的技术性人才和应用型领袖。


保证100%免费】
2025人工智能大模型的技术岗位与能力培养随着人工智能技术的迅速发展和应用 , 大模型作为其中的重要组成部分 , 正逐渐成为推动人工智能发展的重要引擎 。大模型以其强大的数据处理和模式识别能力, 广泛应用于自然语言处理 、计算机视觉 、 智能推荐等领域 ,为各行各业带来了革命性的改变和机遇 。


大模型核心原理与Prompt:掌握大语言模型的核心知识,了解行业应用与趋势;熟练Python编程,提升提示工程技能,为Al应用开发打下坚实基础。
RAG应用开发工程:掌握RAG应用开发全流程,理解前沿技术,提升商业化分析与优化能力,通过实战项目加深理解与应用。
Agent应用架构进阶实践:掌握大模型Agent技术的核心原理与实践应用,能够独立完成Agent系统的设计与开发,提升多智能体协同与复杂任务处理的能力,为AI产品的创新与优化提供有力支持。
模型微调与私有化大模型:掌握大模型微调与私有化部署技能,提升模型优化与部署能力,为大模型项目落地打下坚实基础。
实战专家亲授,让你少走弯路
- 真实商业项目实训
- 大厂绿色直通车
人才库优秀学员参与真实商业项目实训
以商业交付标准作为学习标准,具备真实大模型项目实践操作经验可写入简历,支持项目背调
大厂绿色直通车,冲击行业高薪岗位
保证100%免费】
![[论文阅读] AI + 教育 | 智能聊天机器人如](https://www.n569.com/uploads/allimg/c251103/1L21463b42440-45U3_lit.png)





 关注微信
关注微信